



Новое поступление

Мини FPV VR очки 3 дюйма 480*320 дисплей 5 8G 40CH авто-поиск встроенный 7 V 1200mAh аккумулятор
3 734,77 руб.

Разъем стержня для цилиндра и поршня ASP FS52AR FS61AR 4-тактный Nitro Двигатели автомобиля

VKAR гоночный короткий курс грузовик X10 V2 MA305 подвеска PIN 1/10 RC монстр автозапчасти |
324,92 руб.

Радиоуправляемый передатчик Walkera DEVO 7E 2 4G 7CH DSSS с приемником RX601/RX701 для
5 717,93 - 7 006,43 руб.

SURPASS HOBBY 2814 1300KV 14 полюсов бесщеточный двигатель и 40A ESC 2-4S для RC самолета с

Комплект с рамкой GEPRC GEP-Hummingbird PNP/BNF FPV для использования в помещении мини-дроны

SYMA X8 X8C X8G X8W X8HC X8HW оси UAV черный и белый Лопасти пропеллера обновление защитный
634,91 руб.
Характеристики
Контроллер полета Pixhawk PX4 Autopilot PIX 2.4.8 32 бит игровые джойстики с защитным
История изменения цены
*Текущая стоимость уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Apr-18-2026 | 0.73 руб. | 0.75 руб. | 0 руб. |
| Mar-18-2026 | 0.27 руб. | 0.7 руб. | 0 руб. |
| Feb-18-2026 | 0.88 руб. | 0.63 руб. | 0 руб. |
| Jan-18-2026 | 0.30 руб. | 0.43 руб. | 0 руб. |
| Dec-18-2025 | 0.17 руб. | 0.78 руб. | 0 руб. |
| Nov-18-2025 | 0.99 руб. | 0.58 руб. | 0 руб. |
| Oct-18-2025 | 0.36 руб. | 0.30 руб. | 0 руб. |
| Sep-18-2025 | 0.55 руб. | 0.19 руб. | 0 руб. |
| Aug-18-2025 | 0.84 руб. | 0.87 руб. | 0 руб. |
Описание товара




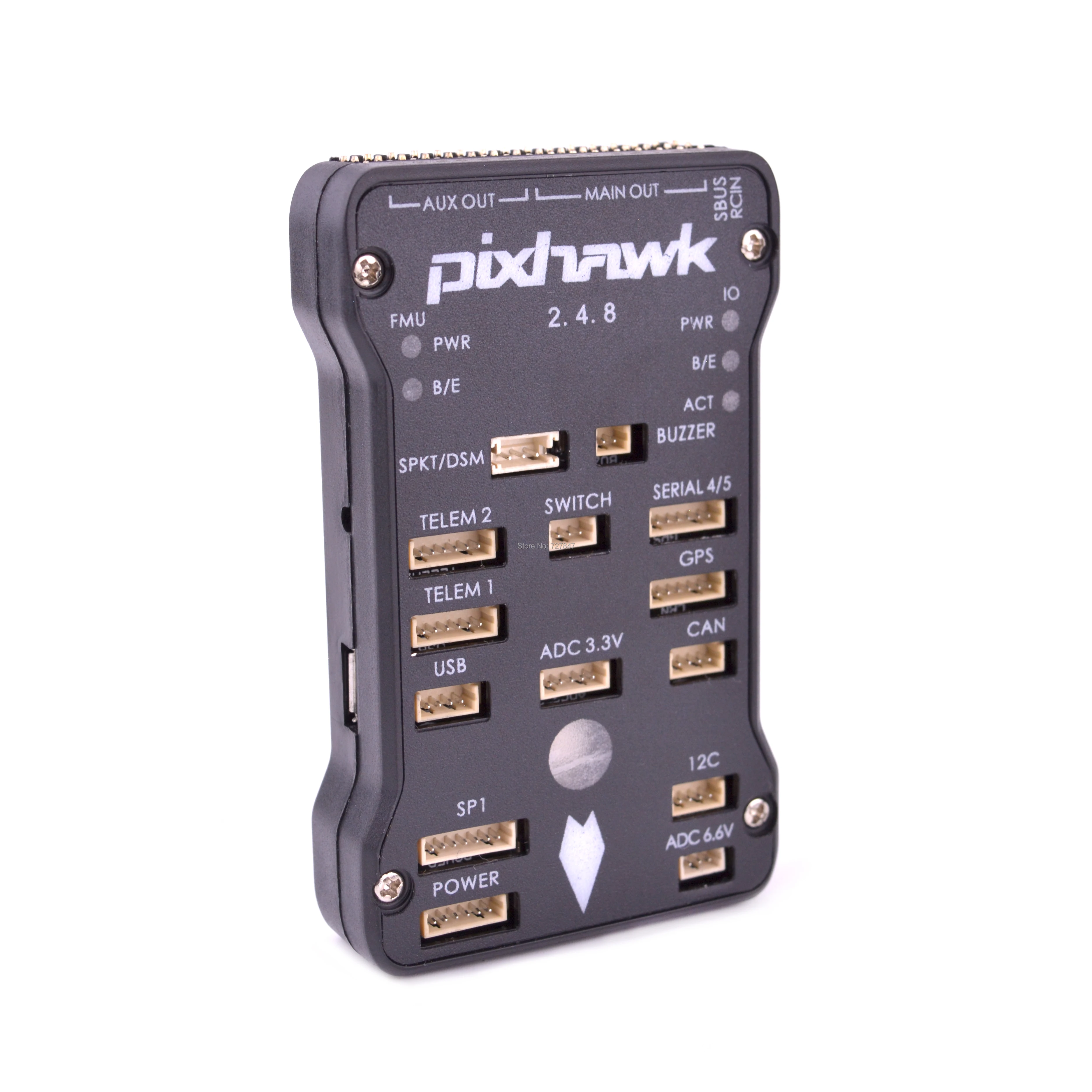
Pixhawk PX4 автопилот PIX 2.4.8 32 бит Контроллер полета
Особенности:
1. Усовершенствованная 32-битный ARM CortexM4 высокопроизводительных процессоров, может работать NuttX RTOS операционной системы в режиме реального времени;
2. 14 PWM/сервовыход;
3. Интерфейс шины (UART, I2C, SPI, CAN);
4. Интегрированный резервный источник питания и резервный контроллер сбой, основной контроллер не в состоянии к резервному контролю безопасен;
5. обеспечить автоматические и ручные режимы;
6. Обеспечивает резервный вход питания и аварийное переключение;
7. многоцветный светодиодный свет;
8. обеспечить многотоновый зуммер интерфейс
9. Micro SD запись данных полета;
Технические характеристики:
Микропроцессор
1,32 2 Мб flash STM32F427 Cortex M4, с аппаратным плавающим устройством обработки
2. Частота: 168 МГц, 256 K ram
3,32 STM32F100 резервного копирования сопроцессор
Сенсор
1. L3GD20H 3-осевой цифровой гироскоп 16
2. LSM303D 3-осевой акселерометр 14/магнитометр
3. MPU6000 6-осевой акселерометр/магнитометр
4.MS5607Прецизионный барометр
Интерфейс
1. 5 высоковольтный совместимый UART 1, 2 с аппаратным контролем потока
2. 2 может
3. спутниковый ресивер Spektrum DSM/DSM2/DSM-X совместимый вход
4. Futaba SBUS совместимые входы и выходы
5. вход сигнала PPM
6. RSSI (PWM или напряжение) вход
7. I2C
8. SPI
Вход 9.3.3 и 6,6 VADC
10. внешний интерфейс MICRO USB
Примечание:Перед подключением к компьютеру необходимо сначала вставить sd-карту, затем флэш-карту, иначе светодиодный индикатор не загорится.
Перед использованием убедитесь, что вы прочли эти Вики и видео. И не просто подключите, затем скажите «светодиодный индикатор не мигает» или не откалибровать хорошо, затем открыть спор.
Упаковочный лист:
Pixhawk 2.4.8 32 бит рукоятка управления полетом 1
Оригинальный чехол-1 шт.
Кнопка безопасности и зуммер x 1-Кнопка безопасности и зуммер x 1(2 вида дизайна отправляются наугад)
4G tf-карта (прошивка IO написана) x1
Кабель сервоусилителя x 1
4pin отложным воротником 4pin кабель х 1
3pin DuPont линия x1
Модуль расширения сплиттера 2c x1
PIX 2.4.8 является DIY упрощенной версией, если вам нужен stardard verison PIX 2.4.7, пожалуйста, купите здесь.
Https:/store/product/Pixhawk-PX4-Autopilot-PIX-2-4-5-32-bit-ARM-Flight-Controller-for-RC-Multicopter/727847_32222334441.html



Смотрите так же другие товары: