





Новое поступление

1 комплект EDF полностью металлический воздуховод JP 90 мм с тремя выбор двигателя 4250
20 137,47 руб.

Новый стиль алюминиевый корпус для Raspberry Pi 3 совместим с 2/B + | Игрушки и хобби

Tenshock 7075-T6 CNC Prop 2 Blade Al Drive Dog Right 3/16 дюйма Пропеллер для RC лодки | Игрушки и хобби
1 215,73 руб.

2 шт. XT60 разъем для TRX Traxxas штекер Силиконовый 12AWG кабель провода адаптер | Игрушки и
632,57 руб.

Контроллер мобильного телефона IOIO OTG Android Google IO PIC Singlechip | Игрушки и хобби
2 933,03 руб.

Кузова для baja 5b ss 5t (rc car. Игрушка) | Игрушки и хобби
598,88 руб.

1/10 RC Drift OnRoad бесщеточный/Nitro R8 AUDII плоский 190 мм прозрачный корпус для Kyosho Tamiya FW06
1 720,29 - 8 061,73 руб.
Характеристики
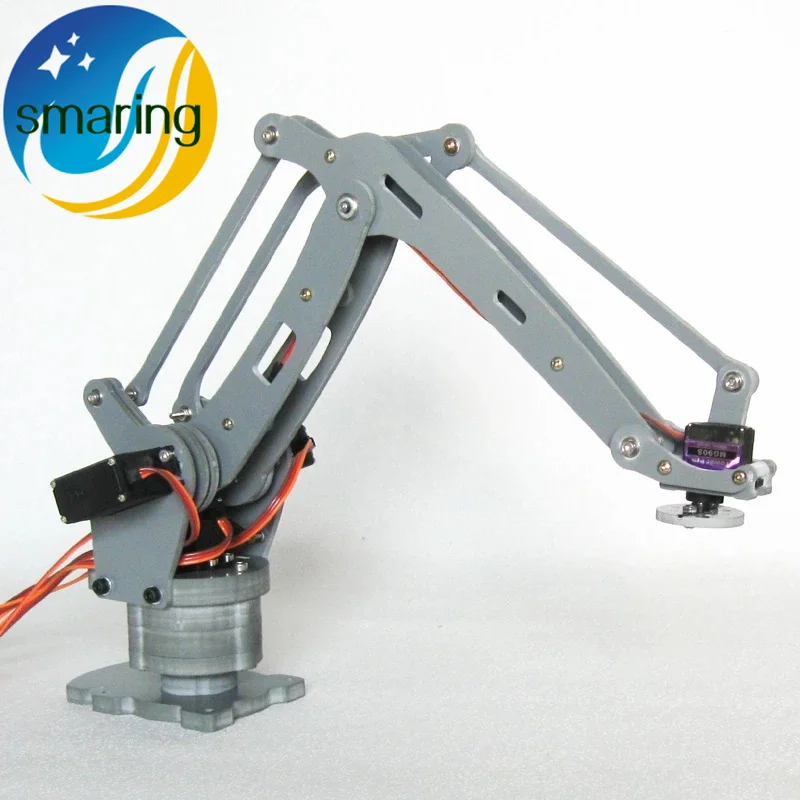
ABB irb 460 промышленная модель роботизированной руки осевая паллейка CNC 4-DOF
История изменения цены
*Текущая стоимость 9 151,70 - 11 768,82 уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Mar-17-2026 | 11622.22 руб. | 11854.17 руб. | 11738 руб. |
| Feb-17-2026 | 9426.22 руб. | 9615.94 руб. | 9520.5 руб. |
| Jan-17-2026 | 11439.71 руб. | 11668.9 руб. | 11553.5 руб. |
| Dec-17-2025 | 11347.67 руб. | 11574.32 руб. | 11460.5 руб. |
| Nov-17-2025 | 9059.83 руб. | 9240.42 руб. | 9149.5 руб. |
| Oct-17-2025 | 11164.39 руб. | 11387.51 руб. | 11275.5 руб. |
| Sep-17-2025 | 11073.17 руб. | 11294.76 руб. | 11183.5 руб. |
| Aug-17-2025 | 10981.62 руб. | 11201.14 руб. | 11091 руб. |
Описание товара






Характеристики модели роботизированной руки Нагрузка: около 300 граммов, чем меньше угол опоры, тем больше Имитирует настоящую структуру рукоятки робота-паллетиста, моделирует детали Рама из ПВХ, обработка ЧПУ Использование трех MG996r медная шестерня 13 кг/см рабочий Крутящий момент сервопривода 180 градусов Подвижные детали (шарнир) с помощью соединения подшипника Без логотипа, товаров для телефона Предоставление демонстрационной программы Винты для модификации Модель манипулятора в сборе, проверка доставки Предоставляем обучающие материалы arduin0, манипулятор управления исходным кодом Сервоманипулятор с использованием модели, ориентированной на обучение и тестирование, не подходит для работы в трубопроводе Серводвигатель с помощью общего редуктора, серводвигатель на запястье имеет свободный ход около 4 мм Список доставки: Пункт 1: только рама (в сборе) Пункт 2: полный комплект (рамка + контроллер + блок питания)







Пример управления роботизированной рукояткой: (управление arduin0, примеры демонстрируют, что угол вращения видео немного отличается)
Образец контрольного кода:
/Развертка
# Включая <сервопривод. h>
Сервопривод myservoA; /Создание серводвигателя для управления Сервоприводом
Сервопривод myservoB;
Сервопривод myservoC;
Сервопривод myservoD;
Int pos = 20; /Переменная для хранения положения сервопривода
Настройка пустоты ()
{
MyservoA. Прикрепить (9); /прикрепляет сервопривод на штыревой 9,10,11,6 к сервообъекту
MyservoB. Прикрепить (10);
MyservoC. Прикрепить (11);
MyservoD. attach(6);
}
Пустая петля ()
{
Для (pos = 0; pos <= 1000; pos + = 1)
{
MyservoB. write(int (карта (pos,1,1000,65,30); /скажите сервоприводу, чтобы перейти в положение в переменной 'pose'
MyservoC. write(int (карта (pos,1,1000,50,70);
Задержка (1);
}
Задержка (1000);
Для (pos = 0; pos < 500; pos + = 1)
{
MyservoB. write (карта (pos, 1500, 30,65);
MyservoC. write (карта (pos, 1500, 70,50);
MyservoA. write(70);
Задержка (1);
}
Для (pos = 0; pos < 500; pos + = 1)
{
MyservoA. write (карта (pos, 1500, 70150);
MyservoD. write (карта (pos, 1500, 0180);
Задержка (1); /waits 1ms * 500 для сервопривода, чтобы достичь положения
}
Для (pos = 0; pos < 1000; pos + = 1)
{
MyservoB. write (карта (pos,1,1000,65,30);
MyservoC. write (карта (pos,1,1000,50,70);
Задержка (1);
}
Задержка (1000);
Для (pos = 0; pos <= 1000; pos + = 1)
{
MyservoB. write (карта (pos,1,1000,30,65);
MyservoC. write (карта (pos,1,1000,70,50);
Задержка (1);
}
Для (pos = 0; pos<= 1000; pos + = 1)
{
MyservoA. write (карта (pos,1,1000,150,70);
MyservoD. write (карта (pos,1,1000,180,0);
Задержка (1);
Смотрите так же другие товары: