
Комплект запасных частей для камеры ZEROTECH Dobby Pocket Selfie Drone (не новый)|Детали и
3 052,69 руб.



Новое поступление
Характеристики
*Текущая стоимость 15 670,14 уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Apr-17-2026 | 18647.0 руб. | 19579.19 руб. | 19113 руб. |
| Mar-17-2026 | 18491.24 руб. | 19416.45 руб. | 18953.5 руб. |
| Feb-17-2026 | 15513.7 руб. | 16289.93 руб. | 15901 руб. |
| Jan-17-2026 | 18177.20 руб. | 19086.71 руб. | 18631.5 руб. |
| Dec-17-2025 | 15827.11 руб. | 16618.63 руб. | 16222.5 руб. |
| Nov-17-2025 | 17864.75 руб. | 18757.69 руб. | 18310.5 руб. |
| Oct-17-2025 | 17707.11 руб. | 18592.67 руб. | 18149.5 руб. |
| Sep-17-2025 | 17550.79 руб. | 18428.95 руб. | 17989 руб. |
| Aug-17-2025 | 17394.41 руб. | 18264.20 руб. | 17829 руб. |
Описание товара





Особенности продукта
-Новый и небольшой форм-фактор
-Больше вычислительной мощности и 2X оперативной памяти, чем в предыдущих версиях
-Новые датчики с более высокой стабильностью температуры
-Интегрированная изоляция вибраций
-Увеличенная Простота в использовании: предустановленный с самым последним PX4 (v1.7)
-Дополнительные порты для лучшей интеграции и расширения
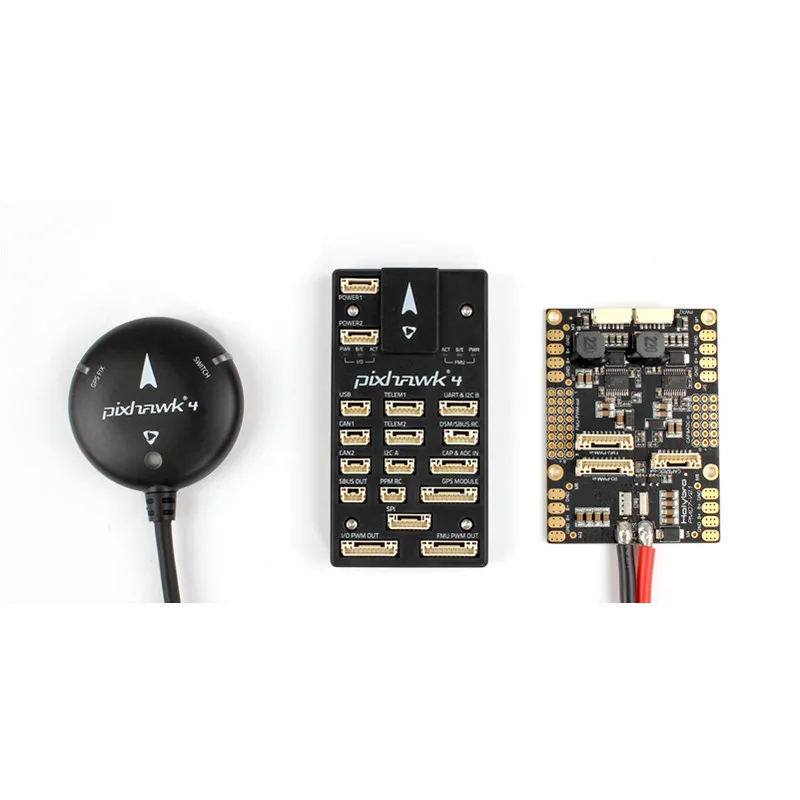
Описание товара
Pixhawk ® 4 является последним обновлением для успешного семейства контроллеров полета Pixhawk. Он разработан и разработан в сотрудничестве с Holybro и командой PX4, оптимизирован для запуска полного стека Dronecode и поставляется предварительно установленным с последней прошивкой PX4 (v1.7).
Он оснащен самой передовой процессорной технологией ST Microelectronics ® , сенсорной технологией от Bosch ® , InvenSense® и операционной системой NuttX в реальном времени, обеспечивающей невероятную производительность, гибкость, И надежность управления любым автономным транспортным средством.
Микроконтроллер Pixwhawk 4 имеет 2 Мб флэш-памяти и 512кб оперативной памяти. Благодаря увеличенной мощности и ОЗУ разработчики могут быть более продуктивными и эффективными с помощью своей работы по разработке. На автопилоте могут быть реализованы более сложные Алгоритмы и модели.
Высокая производительность, низкий уровень шума IMUs на борту предназначены для стабилизации приложений. Сигналы, готовые к передаче данных от всех датчиков, направляются для разделения контактов прерывания и таймера захвата на автопилоте, что обеспечивает точное время штамповки данных датчика. Недавно разработанные виброизоляции позволяют более точные показания, что позволяет транспортным средствам достичь лучших общих представлений полета.
Два внешних SPI автобуса и шесть связанных чипов выбирают линии позволяют добавлять дополнительные датчики и SPI-interface Полезная нагрузка. В общей сложности четыре автобуса I2C, два предназначены для внешнего использования и два сгруппированы с последовательными портами для GPS/модули компаса.
Набор для разработки автопилота Pixhawk 4 идеально подходит для разработчиков в корпоративных научно-исследовательских лабораториях, стартапах и для научных работников (исследователей, профессоров, студентов).
Некоторые советы:
//docs.px4.io/en/flight_controller/pixhawk4.html
Загрузка:
Руководство по быстрому запуску Pixhawk4
Руководство по быстрому запуску Pixhawk4 GPS
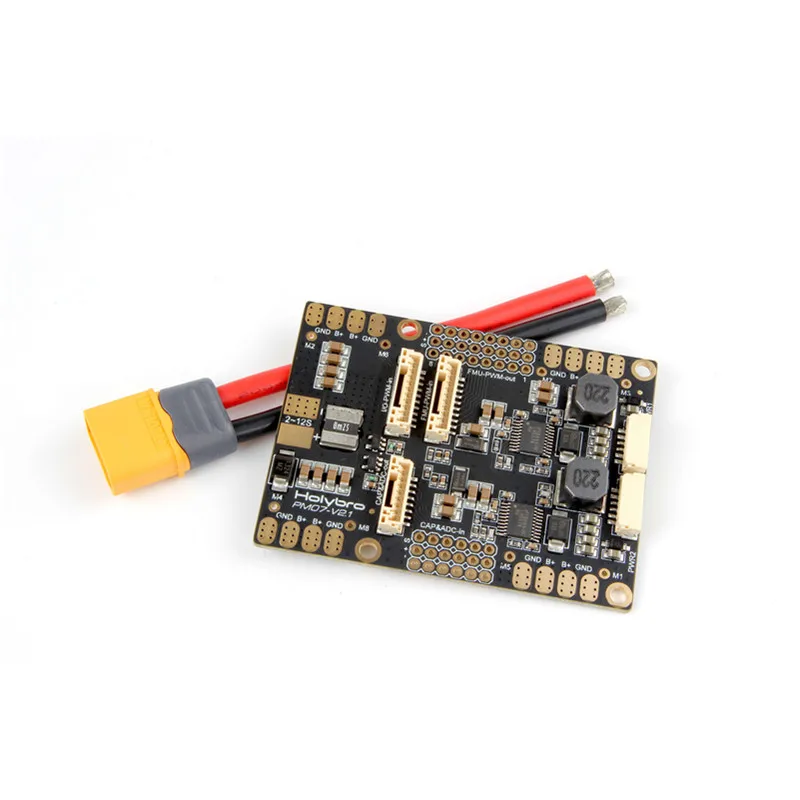
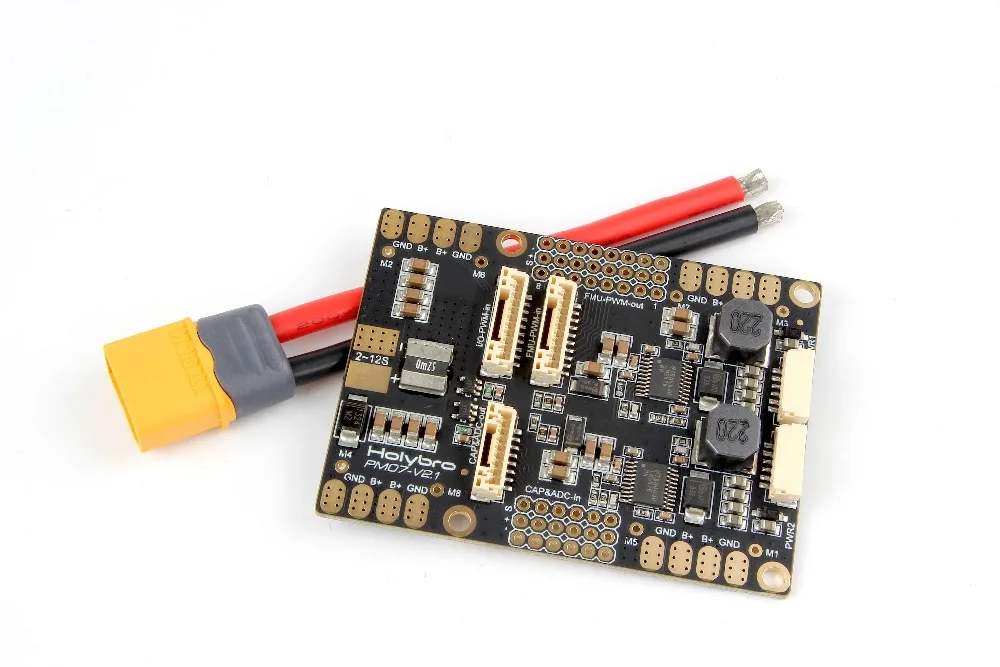
Руководство по быстрому запуску PM07
Pixhawk4 техническое описание
Pinouts Pixhawk4




Смотрите так же другие товары:








