
8 осевой сельскохозяйственный Дрон с высоким током распределительная плата
3 813,03 руб.


Новое поступление

Магазина FSFLY RC HOBBY Store работает с 06.12.2014. его рейтинг составлет 89.66 баллов из 100. В избранное добавили 1966 покупателя. Средний рейтинг торваров продавца 4.6 в продаже представленно 618 наименований товаров, успешно доставлено 6524 заказов. 4313 покупателей оставили отзывы о продавце.
Характеристики
*Текущая стоимость 2 573,61 уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Mar-16-2026 | 3268.18 руб. | 3333.7 руб. | 3300.5 руб. |
| Feb-16-2026 | 2650.25 руб. | 2703.74 руб. | 2676.5 руб. |
| Jan-16-2026 | 3216.1 руб. | 3280.6 руб. | 3248 руб. |
| Dec-16-2025 | 3191.37 руб. | 3255.29 руб. | 3223 руб. |
| Nov-16-2025 | 2547.68 руб. | 2598.52 руб. | 2572.5 руб. |
| Oct-16-2025 | 3139.66 руб. | 3202.64 руб. | 3170.5 руб. |
| Sep-16-2025 | 3113.92 руб. | 3175.39 руб. | 3144 руб. |
| Aug-16-2025 | 3088.24 руб. | 3150.72 руб. | 3119 руб. |
Описание товара





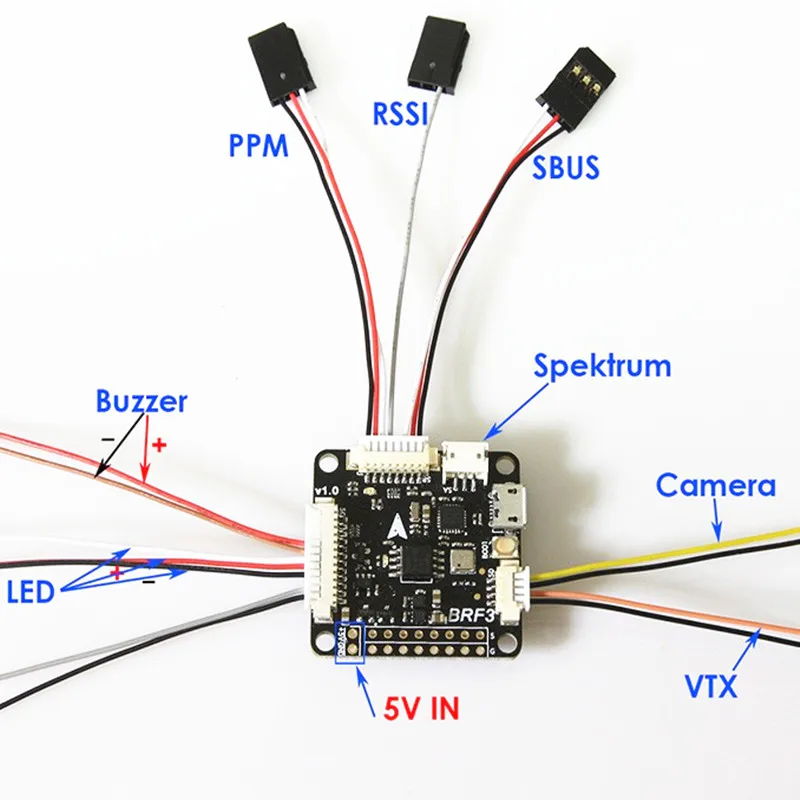
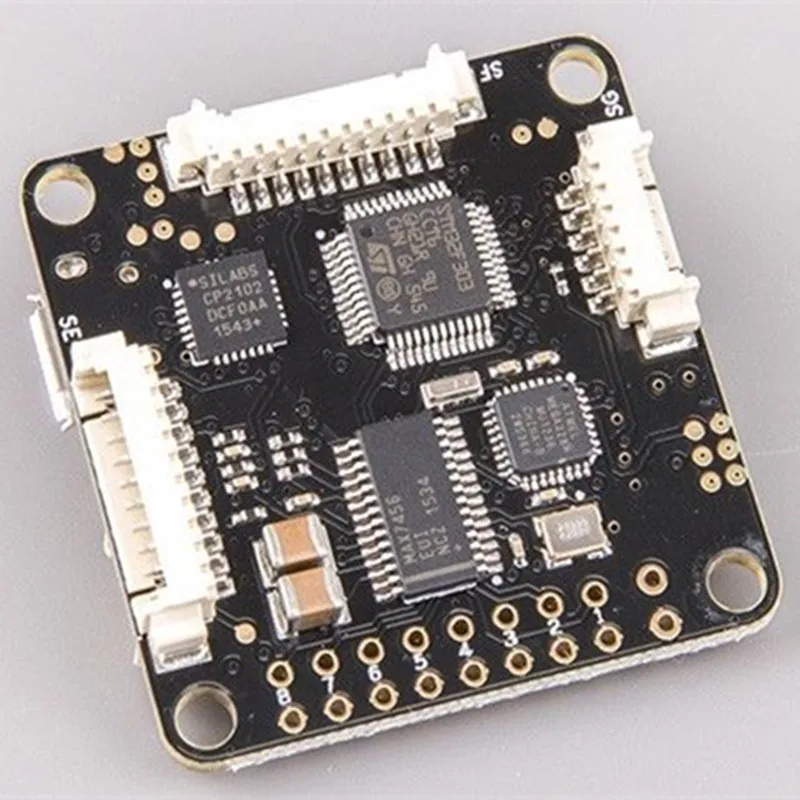
Контроллер полета BeeRotor F3 с OSD для QAV250 280 Robocat270 Mini Quadcopter PDB Board
Примечание:
Контроллер полета BeeRotor F3 с OSD, но не с барометром. Эта плата F3 PDB с барометром
Особенности
• Оптимизация прошивки Cleanflight/Betaflight • ARM Cortex-M4 core STM32F303CC с 32 бит/72 МГц/256K Flash/40K SRAM и аппаратное устройство с плавающей точкой • MPU6050 и BMP180 / BMP280 датчики • Встроенный 8 Мб флэш-память для black box, регистратор • Бортовой OSD с совершенно оригинальный MAX7456EUI + и стандартный FTDI порт отладки • Разъем приемника с PPM/SBUS/SumD/DSM2/DSM-X и входом RSSI • До 3 последовательных портов и 8 выходов ШИМ • Многофункциональные разъемы с SWD/UART2 ~ 3/мягкий-серийный/зуммер/светодиодный сигнал/Обнаружение напряжения • Многофункциональные разъемы OSD с портом video_IN/ video_OUT/ICSP/delight (UART1) • Разъем PDB с входом/током 5 В и обнаружением напряжения • Защита от обратной полярности на входе питания
Параметры
• Мощность Входное напряжение: 5,0 ~ 5,5 V • Размеры: 35x35x9mm • Расстояние между крепежными отверстиями: 30 мм • Вес: 7,3 г • Кабель приемника PPM/RSSI/SBUS/SumD • Кабель камеры/видео-TX • Звуковой сигнал/светодиодный кабель для обнаружения напряжения • OSD порт отладки к FTDI адаптерному кабелю
Начало работы
В первую очередь • Установите lastest Silicon Labs CP2102 USB для UART bridge VCP-драйвера. W w.silabs.com/products/mcu/pages/usbtouartbridgevcpdrivers.aspx • Установите и запустите инструмент конфигуратора Cleanflight. H t p s:/ • Подключите Контроллер полета к компьютеру через usb-кабель. • Выберите правильный com-порт, если он не обнаружен автоматически. • Нажмите «Подключение», убедитесь, что связь установлена.
Базовой комплектации
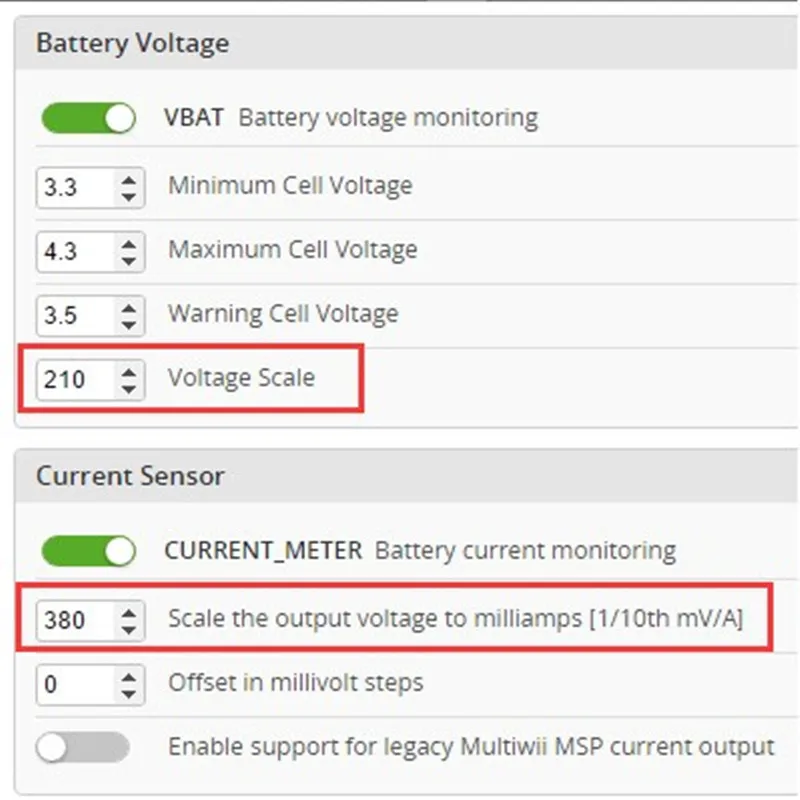
• Калибровки датчиков • Настройки портов. • Включать функции. • Настройка режима приемника. • Настройка контроля напряжения. Шкала напряжения должна быть 110. • Настройка датчика тока. При использовании BRPDB масштаб должен быть около 380. • Настройте RSSI, если вы используете приемник с выходом RSSI. • Настройка других функций. • Настройка приемника, настройка сопоставления каналов. • Узнайте о режимах полета и настройте каналы/переключатели, чтобы активировать их по мере необходимости. • Узнайте, как держать руку/обезопасить. • Скамья-тест failsafe. • Прочитайте Примечания безопасности. • Узнайте, как загрузить и просмотреть журналы полетов, чтобы настроить свой самолет. • Стирайте содержимое dataflash перед первым полетом (так что у вас есть журнал). • Узнайте, как распознавать ненастроенные характеристики полета и эффекты PID-контроллера. (Смотрите некоторые видео). • Первый полет должен быть в режиме Acro/Rate (режим по умолчанию, когда другие режимы не активны). • Мелодия pid. • Параметры резервного копирования. Вспышка прошивки (обновление) • Отключите питание, usb-кабель и перейдите на вкладку «мигалка прошивки». • Нажмите «загрузить прошивку» [local] и найдите файл прошивки. • Убедитесь, что выбран без последовательности перезагрузки/полного удаления чипа/ручного 25600 скорости передачи данных. • Нажмите и удерживайте кнопку загрузки и отпустите после подключения usb-кабеля. • Нажмите на прошивку Flash и дождитесь получения подсказок. Серверный компьютером с экранным меню отладки • Не подключайте питание к quad. • Установите драйвер FT232 VCP и подключите FTDI к порту SE через кабель адаптера FTDI. • Загрузите zip-файл MWOSD GUI и откройте его. • Выберите правильный com-порт и дождитесь чтения параметров конфигурации OSD. • Узнайте, как изменить параметры, шрифт и написать обратно в mcu OSD. Джек и распределения электроэнергии • 328P OSD подключен к F303 через UART1. • Разъем GPS/SWD/I2C подключен к F303 через UART2. • Разъем SBUS/DSM2 подключен к F303 через UART3. • При использовании PDB или внешнего источника питания 5 В, OSD цепь продолжает работать и общаться с F303. Если вы подключите USB кабель, OSD цепь отключена питание, чтобы гарантировать, что FC может общаться с компьютером. • При отладке OSD не подключайте аккумулятор/usb-кабель и просто подключите инструмент FTDI через кабель адаптера FTDI. На этой Время только OSD цепи для работы независимо
Посылка список:
1 * плата приемника
Смотрите так же другие товары:











